Astrobotic Building a 3D Lunar Surface for Testing & Research
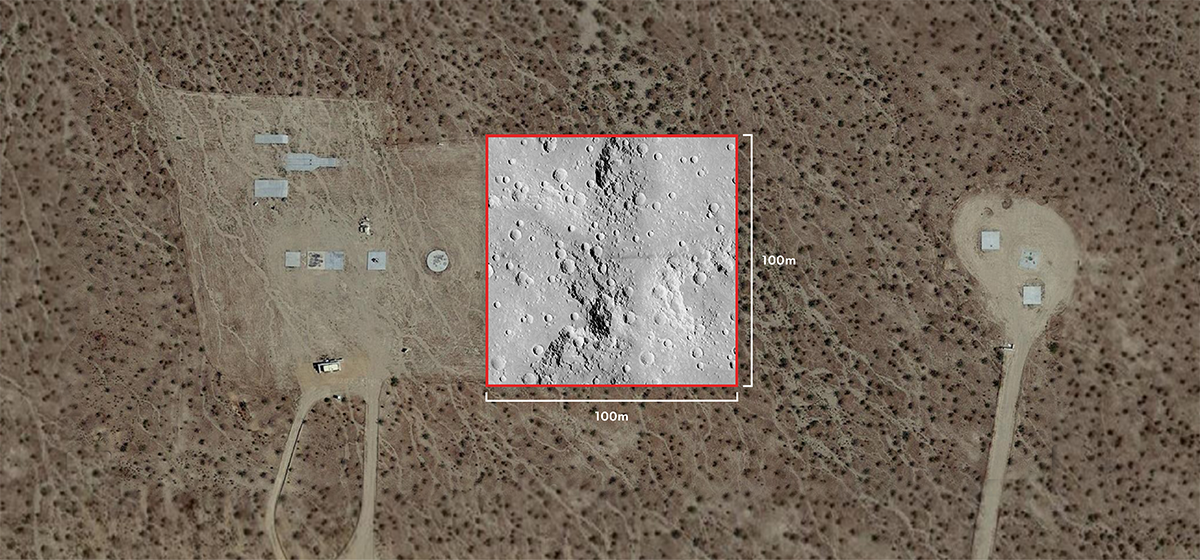
Astrobotic announced today it has begun work on a 100mx100m high-fidelity 3D test field that will mimic the topography and optical properties of the Moon’s surface. This lunar surface analogue test site called the Lunar Surface Proving Ground (LSPG) will be used for a variety of test campaigns, from precise lunar landing technologies like LiDAR scanners and navigation algorithms to lunar rovers and other robotic systems. In addition to providing a realistic lunar topography for spacecraft and rover sensors and systems, this test field will offer a facility for simulating the extreme lighting conditions encountered at the lunar poles.
LSPG will first enhance Astrobotic’s capabilities for testing innovative Entry, Descent, and Landing (EDL) technologies aboard Xodiac, its suborbital rocket lander. Xodiac is currently scheduled to fly four test campaigns over the next year that will demonstrate high-priority EDL systems that could support government and commercial lunar landings. The LSPG will enhance terrestrial testing for planetary landings and further technology development before spaceflight.
The LSPG will debut as the test site for NASA’s Nighttime Precision Landing Challenge, part of the TechLeap Prize, later this year. In that challenge, three winning teams will fly their sensing payloads aboard Xodiac to simulate landing on the Moon during the lunar night. TechLeap is sponsored by NASA’s Flight Opportunities program.
“The accuracy of the LSPG’s terrain will allow our customers to test their technologies using the closest physical copy of lunar terrain available on Earth. We already have four Xodiac campaigns booked to fly their payloads over the test field, and we’re excited to see how else we can leverage the LSPG to advance the readiness of other critical technologies,” says Jenna Edwards, Director of Propulsion & Test for Astrobotic.
Astrobotic designed the LSPG to simulate a region of the Moon’s South Pole because the area has attracted great scientific interest within the lunar community. The terrain for the LSPG, which will be excavated and covered in a layer of solid, unfinished stucco, is modeled after an actual map of the lunar surface scanned by Astrobotic’s LunaRay system. Maps of the region have already been used to inform flight plans and detect hazards for Griffin’s mission to the Moon, and the LSPG will serve as another dynamic verification method for flight systems.
“LunaRay is an industry-leading capability that Astrobotic has been perfecting for about a decade. LunaRay produces some of the highest fidelity maps of the Moon we’ve seen to date and we’re using it to construct the LSPG. LunaRay will model the LSPG after the South Pole landing site for Astrobotic’s Griffin Mission One, carrying NASA’s water-hunting VIPER rover to the lunar surface in late 2024,” says Dan Hendrickson, Vice President of Business Development for Astrobotic.
Astrobotic plans to unveil the completed LSPG later this year at Astrobotic’s Propulsion & Test facility in Mojave, California.